Sylvain… Can you possibly ask Asobo if its possible to offer a
VTOL system like the Halo Pelican has to us developers? Perhaps add it to the
SDK kit? Me and another (very famous) developer have VTOL projects and such a
brilliant VTOL system is much needed. This Pelican is brilliant. Amazing work.
Loving this thing. Do you know what keyboard control activates ‘Hover/Flight’
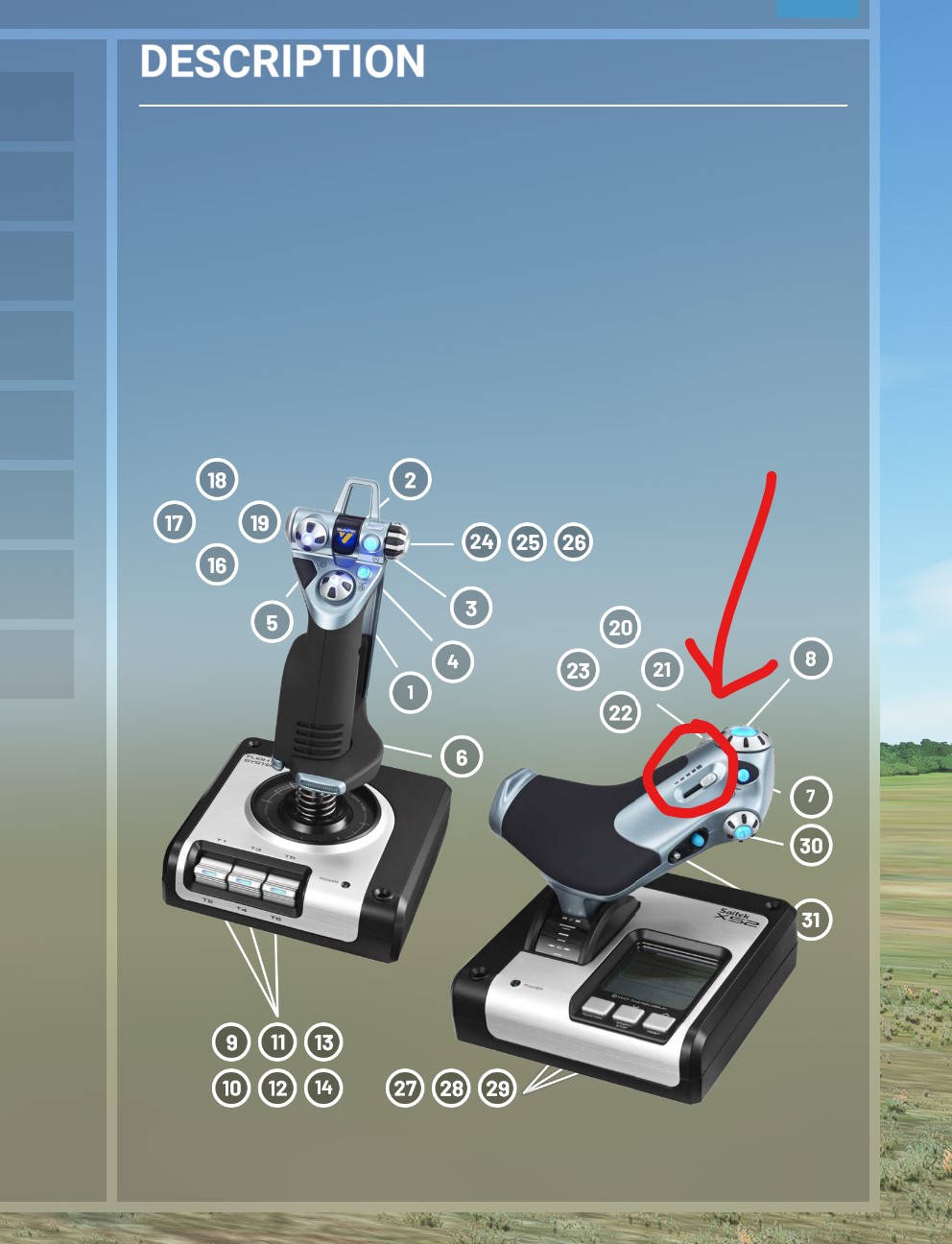
modes? On my joystick, a slider actuates it. But I have no idea what command
it is.
It uses something similar to the sim’s slew function Bill, and the switch to
control it is on the main panel in front of you ( says landing on it ).
Slewing is not flying, so it’s just like the other “vtol” airplanes in MSFS
that are not really VTOL-ing at all.
I do have VTOL projects as well, but do not share your happiness. Flight model
completely unrealistic and arcadish. Even visually, engines animation is
completely illogical. Will helicopters fly with same level of simulation? That
will be a disaster. Instead, each of many engines should have dynamic
ThrustAnglesPitchHeading values and controlled by hovering script naturally.
What we have - synthetic velocity manipulations.
At least its something. Its much nicer then the Volocopter system, in my
humble opinion. I see that there is a primary Pelican XML file which must be
where the flight interaction takes place. I havent had a chance to look
through it yet. It will be interesting to see how it flies. I’ll bet
‘synthetic velocity manipulators’ could be tuned to be very realistic.
without access to the source code - no chance. there is dedicated section in
flight_model.cfg - [PELICAN_FLIGHT_MODEL] with very basic modifiers. p.s. well
at least it’s not WASM but integrated script, works smoother than volocopter.
step forward, I agree.
My findings since we are developing a vtol aircraft: The LVAR that enables
Hover Mode is XMLVAR_Toggle_Boost_Mode When it’s False you enable Hover, and
when true you enable normal mode. Pelican use a template that enables/disables
Hover mode by afterburner toggle binding, but can be set to other event like
full flaps for example. By default XMLVAR_Toggle_Boost_Mode is set to false so
when you load the airplane in the runway is already in Hover. I have tried by
.flt to set the var to true, but this generates two problems: 1.- the airplane
starts to accelerate as soon as the plane is loaded on the runway, it is not
possible to leave it stationary if it was not in Hover mode before 2.- the
animation of the airplane taxiing to the runway, is basically taking off in
hover mode to infinity and beyond (it will never position itself on the runway
so you have to skip it). There’s more issues with this, i don’t know if has to
do with contact points, but the plane while in ground not always can liftoff,
somehow is stuck on the ground. Asobo is aware of the issue, since they are
using this asobo_gt_update: (A:SIM ON GROUND, Bool) (A:GENERAL ENG THROTTLE
LEVER POSITION:1, Percent over 100) 0.6 > and if{ 10 (>A:VELOCITY BODY Y,
knots) } Although this does not look bad in a spaceship, in a plane with
vtol capacity it is unrealistic and not very smooth, since the plane when
applying 60% throttle practically seems to be catapulted at 500fpm when
directly applying 10kknots without being subjected to vertical acceleration or
gravity. In the same way if I change to non-hover mode, the plane gets stuck,
although it is possible to unlock it with a different gt_update in where you
apply velocity body Z. By manipulating the variables included in the flight
model, it is possible to achieve a well-simulated effect of the hover mode If
we ignore the problems mentioned above. By logical deduction I have managed to
deduce two variables that control both the speed of transition and
acceleration as well as the target speed at which the mode is changed
(although it requires tune the other variables): transition_fighter_min_speed
= 185 transition_fighter_max_speed = 210 transition_transport_min_speed = 0
transition_transport_max_speed = 185 One of the things that kills the realism
is that the plane stays completely at 0 degrees pitch and bank during hover
mode. I have not found a way to make the plane pitch or roll according to the
movements of the stick: that is, the plane moves but as if it were frozen.
Sylvain if you could give us more variables to manipulate in the flight model
we would be very grateful.
Really great step forward in bringing VTOL operations in to the sim. (Dreams
of the Harrier) Another point to add is that it IS a spaceship. Modifying some
Engine paramaters and the Flight Model I was able to gain Mach 6.5 and approx
220,000 feet before hitting the hard altitude limit in the sim. I wondered if
there were any thoughts about whether this hard limit might be reviewed and
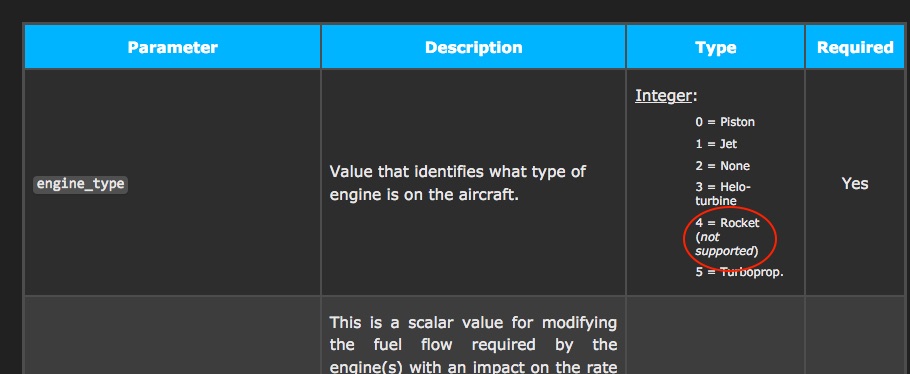
modified going forward - to allow Orbital Flight? It would also involve
introducing Rocket Engine support at some point.