Two new parameters have been added to the contact points section: “spring_exponential fix” and “set_max_compression.” For the latter, the SDK says that if you set it equal to 1, then the parameter that is normally used for the maximum-to-static compression ratio becomes the maximum compression of the contact point (in feet). However, I am finding that this does not always seem to be true.
For example, see the following screenshot, where I am just experimenting with changing values for the contact point to observe the results. For the two main gear I have set 0.6 ft (18 cm) as the maximum compression (with set_maximum_compression = 1). With different values for the “static compression coefficient constant,” one of these main gear maximum compression value is 54 cm, while the other is 30 cm. Is this expected, and if it is, what is the intended use for the “set_max_compression” flag?
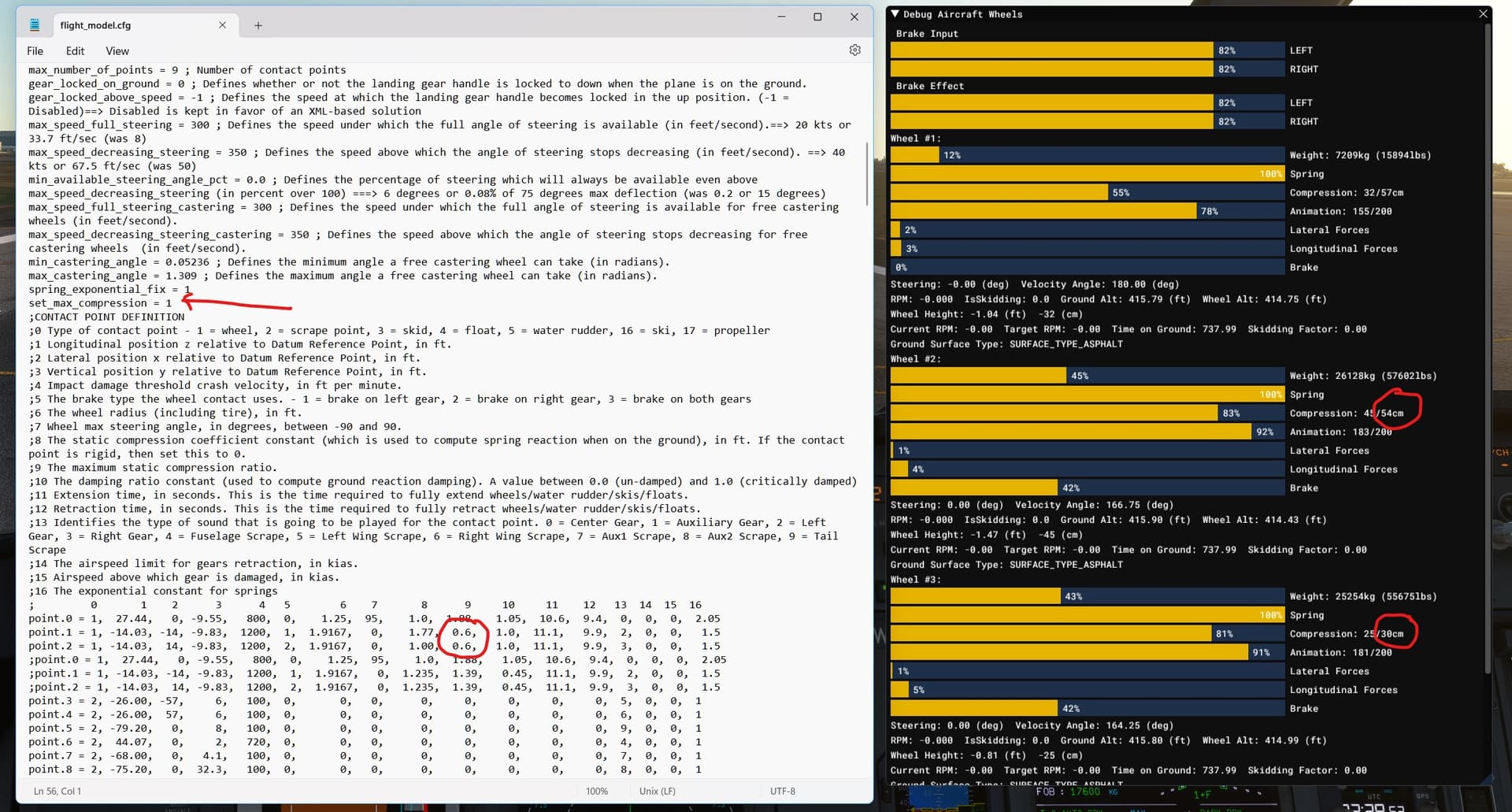
Also, although the actual compression in cm is different for the 2 main landing gear, the percentage of compression is essentially the same, even though the static compression coefficients are different. Is the percent compression solely a factor of the exponential spring constant? How does the static compression coefficient come into play?
For the Excel file provided in the SDK to help in visualizing the effect of the exponential spring constant fix, what should be placed in the cell labeled "Contact point static load (sustain weight)? Should this be the load on the specific contact point when the airplane is at maximum weight?
The weights debug window in the screenshot includes a slider for “Spring.” What does this slider represent, and what are the ramifications for it being at 100%?