Kudos for fixing the long-standing issue of not taking into account payload effects on MOI. However, the SDK description on how to enable this using the “empty_inertia_tensor” parameter in the online flighting SDK appears to be missing.

2 Likes
Any idea how and what value we should use?
Found it is a vector of three floats, but didn’t know what values are “normal”
Hello,
This part of the documentation is “work in progress”.
It’s being worked on as we speak, and will be available before the SU3 release.
Regards,
Sylvain
2 Likes
Too beta test this new feature, it would be great to know how it worked. A hint would be helpfull.
1 Like
I understand but it’s rather complex (~4 pages of documentation) and some technical aspects of the implementation are still being discussed.
Unless @An.Petrovich feels comfortable giving you a glimpse, I’d rather wait for at least a preliminary version of the public documentation.
Regards,
Sylvain
2 Likes
Hello,
Indeed, the SDK will provide complete documentation,
but just to give you a very brief idea of the main points:
empty_inertia_tensor = Jxx, Jyy, Jzz, Jyz, Jxz, Jxy
It is a comma-separated array of 3 to 6 doubles represents the full inertia tensor of an empty aircraft: Jxx (pitch MOI), Jyy (yaw MOI), Jzz (roll MOI), Jyz (coupled MOI), Jxz, Jxy
Jxx, Jyy, Jzz - are mandatory, Jyz, Jxz, Jxy - are optional.
Units: [slug*ft^2]
Sign convention for centrifugal MOI: standard (not alternative)
It is relative to the CG of the empty aircraft (not to the origin or datum point),
and in the MSFS/DirectX basis (X - lateral axis, Y - vertical axis, Z - longitudinal axis)
This new param overrides params: empty_weight_pitch_MOI, empty_weight_roll_MOI, empty_weight_yaw_MOI, and empty_weight_coupled_MOI BUT only if it passes the validity check for the tensor - you can observe errors/warnings in the console, if any.
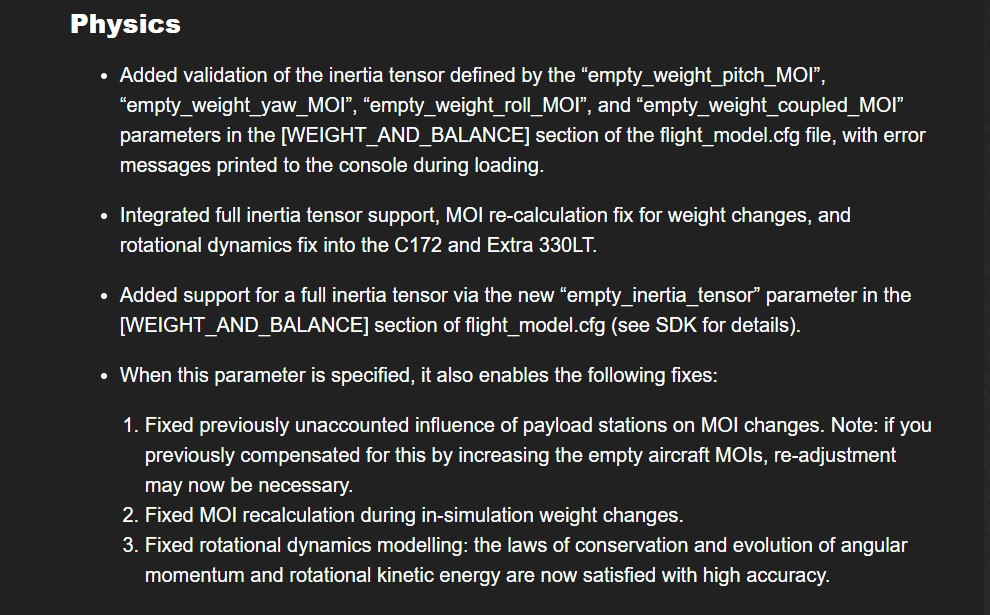
If it is present and valid it activates the following fixes:
- The addition of payload stations now correctly affects the aircraft’s moments of inertia by updating the full inertia tensor matrix accordingly.
Previously, all payload stations were merged into a single equivalent mass before being added to the aircraft, which led to incorrect accounting for the effect of spatially separated masses on the moments of inertia (a long-standing issue present since FS 2004 at least).
NOTE:
If you previously compensated for this by increasing the empty aircraft MOIs, re-adjustment may now be necessary for the new parameter values.
-
Fixed incorrect recalculation of moments of inertia during simulation when the aircraft’s weight changes (e.g., fuel addition/consumption, payload release, etc.). The previous algorithm computed the additional terms to moments of inertia relative to the CG of the empty aircraft, instead of relative to the actual CG, which shifts as the mass distribution changes.
-
The full 3×3 inertia tensor is now used for aircraft rotation modeling. Previously, only the three main moments of inertia (calculated for the loaded aircraft, i.e. including additional weight) were taken into account, while the computed centrifugal (product of inertia) terms were ignored as if they were zero.
-
Fixed several issues in rotational dynamics modeling that could result in physically incorrect aircraft rotation, especially at high angular velocities.
The laws of conservation and evolution of angular momentum and rotational kinetic energy are now satisfied with high accuracy. -
Increased limits for angular velocity (up to 10 revolutions per second) and angular acceleration (up to 10 revolutions per second within 0.1 sec) in critical simulation scenarios caused by incorrect flight model settings. These limits serve solely as safeguards to prevent the sim from crashing and are not expected to be triggered under normal conditions in any gameplay scenario.
Hope it helps!
S!
6 Likes
Thank you got it to work ![]()
2 Likes
Hi everyone,
Please have a look at the announcement we just made regarding the new “empty_inertia_tensor” being postponed until after SU3.
Best regards,
Eric / Asobo
1 Like